古建筑测绘方法适用性对比分析
钟粹宫简介
钟粹宫是故宫内廷东六宫之一,于明代永乐十八年(1420年)建成,初名咸阳宫,明代嘉靖十四年(1535年)更名为钟粹宫,“钟粹”意为汇集精粹。清代沿用明朝旧称,于顺治十二年(1655年)对其进行重修,后又经多次修葺。特别是清代晚期,于同治八年(1869年)在宫门内添建垂花门、游廊等,是对钟粹宫建筑改动最大的一次。
钟粹宫院落平面近方形,分成前、后两进院(图1)。前院正殿即钟粹宫,坐北朝南,是一座面阔5间、前出廊的单檐歇山顶大殿。殿前有东、西配殿各3间,前出廊,单檐硬山顶。正殿左右拐角游廊与配殿前廊相连。院落正门名钟粹门,坐北朝南,是一座带斗栱的单檐歇山顶琉璃门,门内有悬山卷棚顶倒座式垂花门,垂莲柱下置四扇屏门,门两侧依南墙有游廊,与垂花门及配殿前廊相通,形成三合院带四周回廊的格局(图2)。后院也是一正两厢的三合院,不过较前院规模略小,屋顶都是较低等级的硬山式。后殿两侧有低矮的东、西耳房,前有卡墙,自成小区[1]。院内西南角有井亭1座。这组建筑是一座典型的宫中宅院。
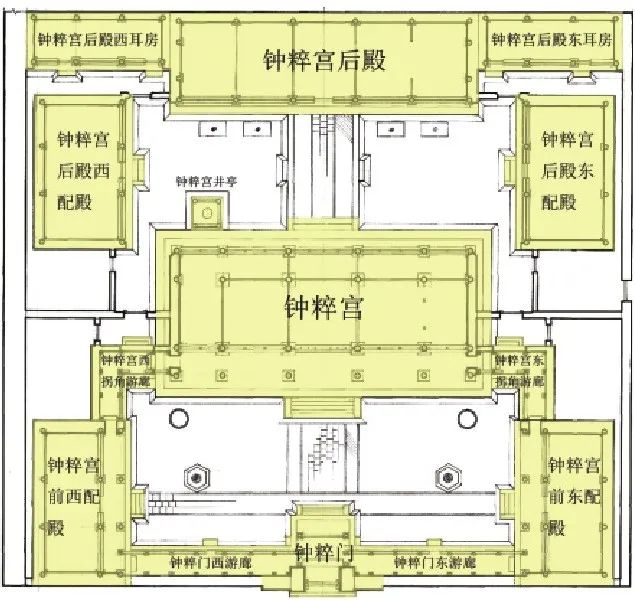
图1:钟粹宫院落总平面图
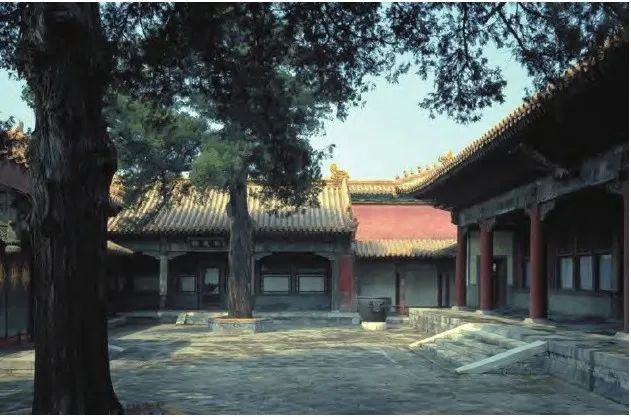
图2:钟粹宫前院
钟粹宫在明代为妃嫔们所居,隆庆时期曾一度作为皇太子宫,到清代又成为后妃们的生活区。清代咸丰皇帝孝贞显皇后(即后来的慈安太后)入宫时便住在钟粹宫,后经垂帘听政等多般周折又返回这里,直至光绪七年(1881年)去世[2]。光绪皇帝大婚后,隆裕皇后也一直在此宫居住。
项目范围与工作目标
钟粹宫综合测绘项目的范围是包括钟粹门、钟粹门西游廊、钟粹门东游廊、钟粹宫、钟粹宫前西配殿、钟粹宫前东配殿、钟粹宫西拐角游廊、钟粹宫东拐角游廊、钟粹宫后殿、钟粹宫后殿西配殿、钟粹宫后殿西耳房、钟粹宫后殿东配殿、钟粹宫后殿东耳房、钟粹宫井亭在内的14座古建筑。
工作目标在于将钟粹宫院落内14座古建筑的现状通过三维激光扫描、数字近景摄影测量、手工测量等多种技术手段进行完整、准确的记录,且以测量记录的结果为依据绘制现状图纸。古建筑的现状数据及其加工成果文件要作为档案永久留存,它们可为古建筑的形制分析和病害判断提供基础信息,并给古建筑的修缮设计方案制定和保护研究等工作提供可靠的原始资料。
项目实施
整体流程
项目的整体工作流程如下:
(1)现场踏勘→(2)资料收集→(3)方案设计→(4)控制测量→(5)三维激光扫描→(6)数字近景摄影测量→(7)手工测量→(8)精度评估→(9)数据比对与图纸绘制
控制测量
本项目的平面坐标采用北京城市坐标系,高程采用北京城市高程系。踏勘得知,在钟粹宫西侧的东一长街上有3个保存完好的二级导线点D29、D30和D31。经检校,其起算控制点边长相对中误差与高程较差均小于允许值的技术要求,因此可作为本项目的起算数据。
根据现场环境条件以及控制强度的需要,本项目的平面控制测量以D30、D31这两个二级导线控制点为起算边,进行四等导线控制加密测量,测量线路为闭合线路(图3),且在钟粹宫室内布设支导线;水准测量则按照四等水准要求施测,以D30、D31这两个控制点为水准测量的启闭点,联测布设的所有四等导线点和支导线点。
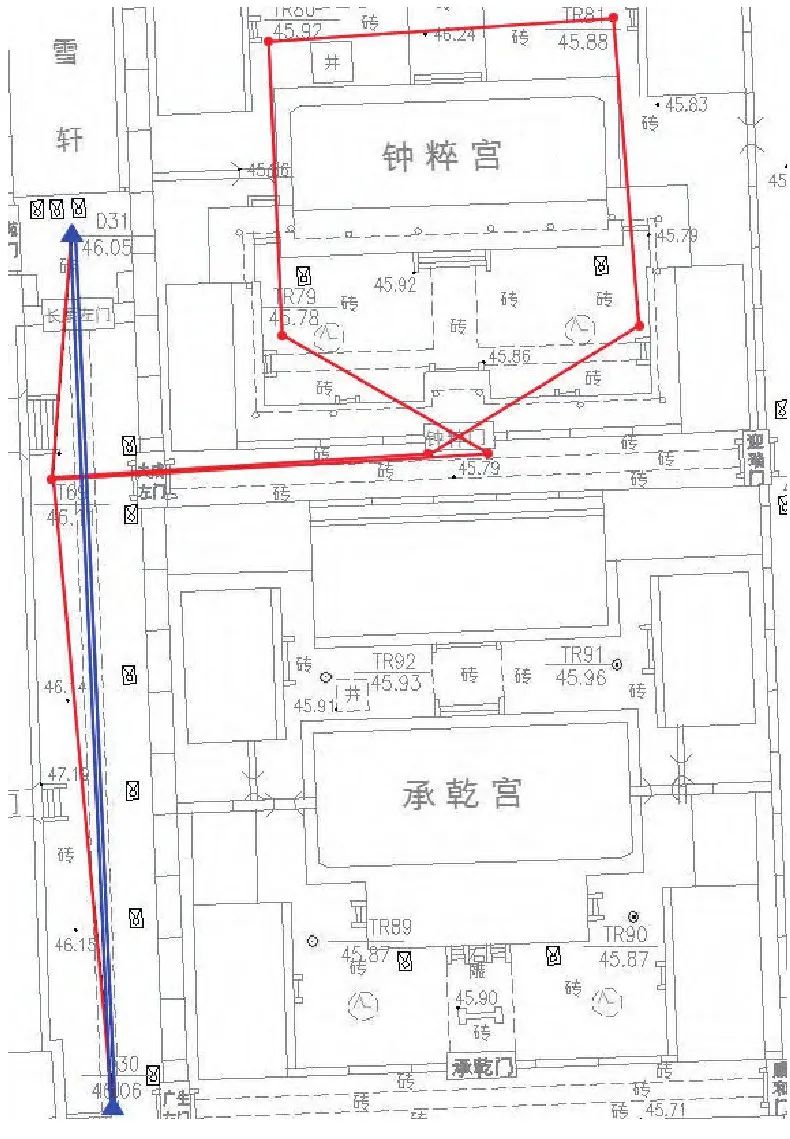
图3:导线布设图
三维激光扫描
现状数据采集
本项目使用美国天宝Trimble FX三维激光扫描仪进行现状点云数据的采集。我们把每座建筑划分为10个区域进行扫描,分别是地面上的东侧、南侧、西侧、北侧4区,瓦顶上的东侧、南侧、西侧、北侧4区,以及室内和天花以上部分。采集时,扫描测站间点云数据的重叠度不应低于30%。各测站之间使用拼接球关联,因此每站拼接球的摆设不得少于4个,且相邻测站使用相同拼接球的数量不得少于3个。我们在每个扫描区域还设置有标靶,要求相邻区域能同时观测到的靶标数量不得少于3个。各区域之间通过靶标进行拼合,这样可以有效控制建筑的整体扫描精度,并将其点云数据与大地坐标联测。
为确保扫描精度,本项目中测量对象到扫描站位的距离均小于15m。钟粹宫的室外扫描共计布设了486站,室内扫描共计布设了178站,扫描测站平均分布于整个院落。
现状数据处理
我们先将扫描数据导入Trimble Realworks软件进行点云拼接,要求相邻测站间的拼接误差小于1mm(图4);再采用3个以上均匀分布的同名点进行点云数据的坐标系转换(通过七参数模型解算出点云坐标系和绝对坐标系之间的转换参数),坐标转换残差小于3mm。当点云数据中存在脱离扫描对象的异常点、孤立点时,需视点的数量选用滤波方法或人工手动进行点云的降噪处理。最后将处理好的单体建筑点云数据合并成完整的钟粹宫院落点云。
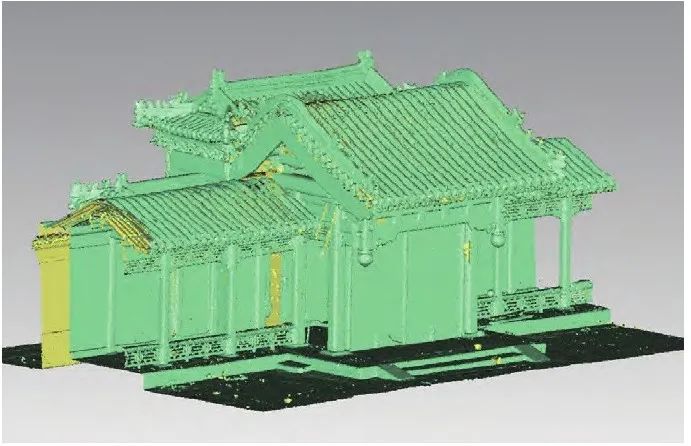
图4:拼接好的钟粹门点云
如需制作便于浏览的抽稀点云文件,则应根据具体情况选择合适的方法,即在扫描对象表面曲率变化不大的区域采用均匀抽稀;而在扫描对象表面曲率变化明显的区域采用保持其特征的抽稀方法。
数字近景摄影测量
现状数据采集
本项目使用索尼全画幅微单数码相机A7RⅡ进行数字近景摄影测量照片的拍摄,校色设备为爱色丽校色仪及色卡。在使用航带法拍摄前,我们对每座建筑都分别进行了摄站规划。各摄站位置拍摄的照片需满足航向和旁向重叠率均不低于70%,且单张照片每平方米的原始像素数不低于2048×2048的要求。为保证照片在航向及旁向的重叠率,我们在每个摄站进行单机位拍摄时,均对目标区域采取多角度拍摄的方式,即正视、仰视和俯视视角拍摄。与此同时,我们还将色卡置于拍摄区域的环境光内,拍摄了用于色彩校正的照片。工作期间,根据现场的光线情况,我们采用了固定灯组与随动灯组相结合的方式布设灯光。对于光线变化比较大的区域,则利用闪光灯组进行拍摄,并采取了相应的匀光措施。现场每拍摄完一航带,我们就会立刻对照片质量和完整度做检查,以便及时进行补拍。
现状数据处理
数字近景摄影测量工作的后期数据处理流程为:(1)照片色彩还原→(2)像控点设置→(3)摄影测量计算→(4)纹理模型生成→(5)正射影像制作。
本项目由于拍摄周期长、光照环境复杂,导致同一区域各时段照片的色彩差异较大,因此色彩还原工作对于保证最终的成果质量尤为重要。我们使用Color Checker Passport、Lightroom等专业软件对采集到的原始照片进行了色彩校正和镜头畸变校正,消除了光源及环境色带来的色差,还原了照片的真实色彩,同时也消除了由相机镜头产生的照片变形。从三维激光扫描仪获得的点云中量取像控点的空间坐标值(注:像控点的分布应相对均匀,且在建筑边缘处加密布设),并将其添加到数字摄影测量软件中之后,该软件就能对完成色彩还原的照片进行摄影测量的计算处理工作了。我们把每个建筑模型分为5部分(即4个立面和1个瓦顶)做计算,各部分之间均有重叠,以利于模型的整体拼接。数字摄影测量软件首先进行初始化计算,将照片对齐后会生成稀疏的点云;对于匹配成功的点云,该软件再次进行加密运算后就会生成三角网纹理模型。把各部分纹理模型通过建模软件进行拼接、修补,即可完成建筑整体三维纹理模型的制作。利用纹理模型投射出的建筑各立面正射影像(图5)具有直观、可量测的特点,能够忠实地反映出古建筑原貌。
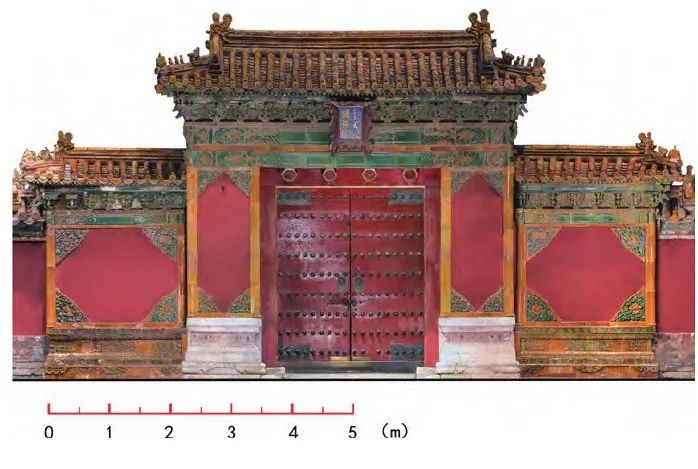
图5:钟粹门南立面正射影像
手工测量
测量性质
本项目中手工测量的工作性质为“全面勘查,典型测绘”。典型测绘要求对古建筑进行整体控制测量,并选取重复构件(部位)中的一个或几个“典型构件(部位)”进行详细测绘。虽然不必逐个测量,但测量范围要覆盖所有类别的构件或部位,不能有类别上的遗漏。这里的类别是按照构件的样式和原始设计尺寸来划分的。只有样式和原始设计尺寸均相同者,才可归为同类构件;若仅样式相同而原始设计尺寸不同,则仍不属于同类构件。所谓“典型构件”,是指那些最能反映特定的形式、构造、工艺特征及风格的原始构件。甄选典型构件时,应细心观察、反复比对和分析判断,尽可能挑选其中保存较好的构件作为测量对象[3]。一般情况下,建立古建筑的记录档案、实施简单的古建修缮工程,或者是出于研究目的进行的测绘都至少应该达到典型测绘的要求。
测量原则与方法
我们使用的测量工具主要有:30米钢卷尺、5米小钢尺、水平尺、角尺、手持式激光测距仪、垂球和细线等。手工测量实质上是把大多数测量问题都转化为距离测量,主要利用上述工具做距离和简易高程的测量,通过直角坐标法或距离交会法进行平面定位。
测量时,我们遵循以下四项基本原则:(1)从整体到局部,先控制后细部;(2)方正、对称、平整等不随意假定;(3)要确保典型构件(部位)的同一性,切忌随意测量不同位置来“拼凑”尺寸;(4)应充分注意能反映古建筑特征的特定情况。为了减少测量误差的积累,同时提高工作效率,我们对能直接量取的数据尽量采用连续读数的方法获得,而不是分段测量后叠加算出;对不能直接量取的数据才采用间接方法求算获得。
三维激光扫描和近景摄影测量成果的精度评估
我们在项目流程中的各个环节都严格按照规范操作,以确保数据质量,并采用随机点抽查法对三维激光扫描和近景摄影测量的成果进行了精度评估,其抽查结果为:点云和摄影测量模型的最大误差均不超过5mm,精度满足项目要求。
二维线划图绘制
本项目的二维线划图按照档案图要求绘制,主要反映古建筑现状的形制特征,不体现古建筑病害与残损信息(建筑结构有严重变形情况的除外)。
我们通过对古建筑重要部位点云数据、摄影测量模型数据、手工测量数据三者的统计与比对,进行了测量数据的精度校验,同时也为二维线划图绘制提供了典型数据(由于摄影测量仅拍摄了古建筑外部,因此室内数据的比对、选取工作不包含摄影测量模型数据)。对古建筑台明、面阔、进深、步长、举高这几处关键性测量数据进行全面统计与比对的结果为:(1)在手工直接测量的古建筑外部,三种方法获得的数据相差不大。(2)在空间狭窄、手工测量难度大的室内,手测尺寸与点云数据的取值则相差较大。这是因为此时的手工测量多为间接测量,即通过公式计算获得相应数值,过程中存在累计误差等问题;而点云数据都是直接量取获得,且回避了构件轻微歪闪等问题,所以其取值更为准确。
利用测量获取的典型数据,我们绘制了钟粹宫院落内各单体建筑的平、立、剖面图(图6)和构件详图,并总结得出以下结论:院落内的古建筑整体保存完好,除垂花门、游廊为清代晚期添建建筑外,其余古建筑均存有明代建筑的时代特征,尤其是钟粹宫正殿具有较突出的明代建筑特征。
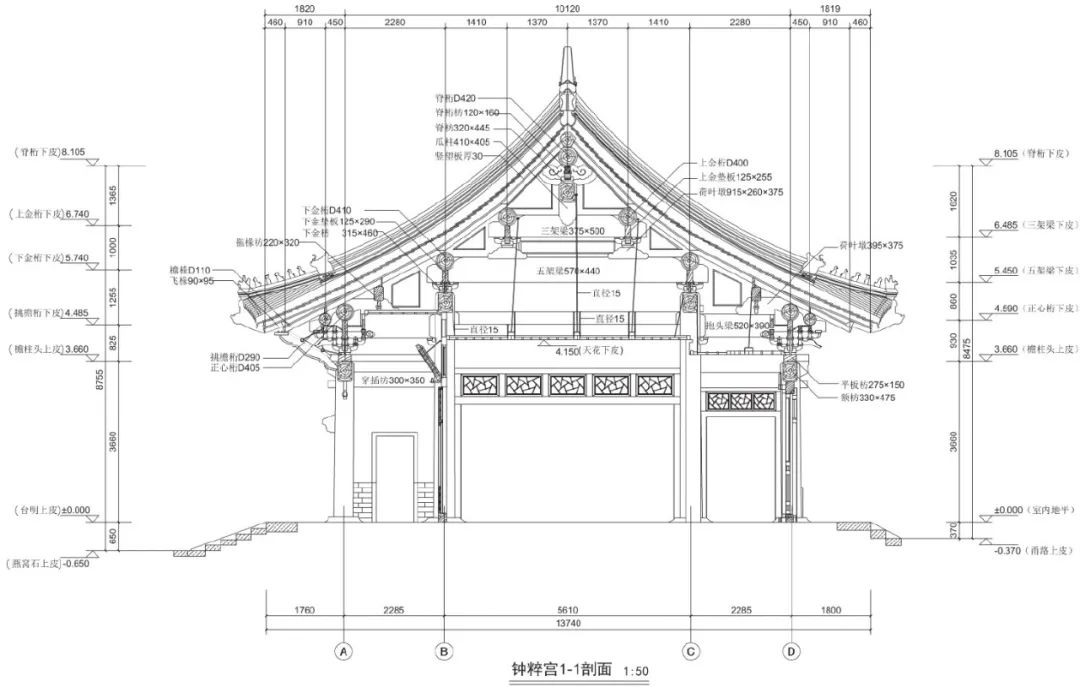
图6:钟粹宫剖面图
测绘方法的比较与应用建议
本次对钟粹宫的测绘项目是采用多种技术手段对古建筑进行综合测绘的一次尝试,主要探索了多种测绘技术在古建筑信息记录方面的优缺点及其结合应用的方法。
三种测绘技术的比较
我们从三维激光扫描、数字近景摄影测量、手工测量这三种测绘技术的适用性、数据采集效率、数据精度、数据完整性、主要成果形式和数据价值等几方面对其进行了详细的分析与比较(表1)。
表1 测绘技术比较表
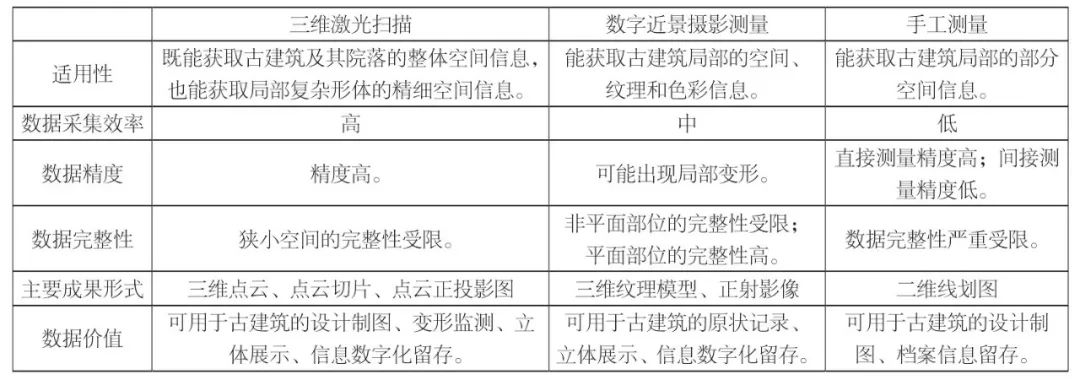
根据对三种测绘技术多方面特性的比较分析,可得出如下综合评估结论:(1)三维激光扫描技术的优势在于能高效获取整体性、控制性的空间数据,且数据精度高,因此它适用于古建筑空间信息的全面采集。(2)数字近景摄影测量技术的优势在于能同步获取纹理与色彩信息,因此它适用于古建筑上对图案纹饰数据采集要求高的部位。(3)手工测量的优势在于能通过现场的综合信息来更加准确地判断隐藏部位的局部构造,且操作的灵活性强,因此它适用于古建筑构造细部的数据量取。
测绘方法的应用建议
从比较分析可以看出,三种测绘技术各有优势,在古建筑测绘中无法相互取代,只有结合应用才能做到全面空间信息、色彩纹理信息、构造细部信息的完整采集。
在实际的测绘项目中,我们要依据成果需求选择相应的数据采集手段,即有选择性的使用三维激光扫描、数字近景摄影测量、手工测量等技术来采集古建筑信息,具体可分为四种情况(表2)。
表2 成果需求与测绘技术选用对照表

综上所述,本项目探索了三维激光扫描、数字近景摄影测量、手工测量这三种技术在古建筑全要素信息采集过程中的应用方法;通过比对进行了数据的精度校验,并绘制了钟粹宫院落内各单体建筑的典型测绘图纸;在分析三种技术多方面特性的优缺点后,提出了根据实际需求选择适当技术的测绘模式。
